L-5010 - Motor Characteristics
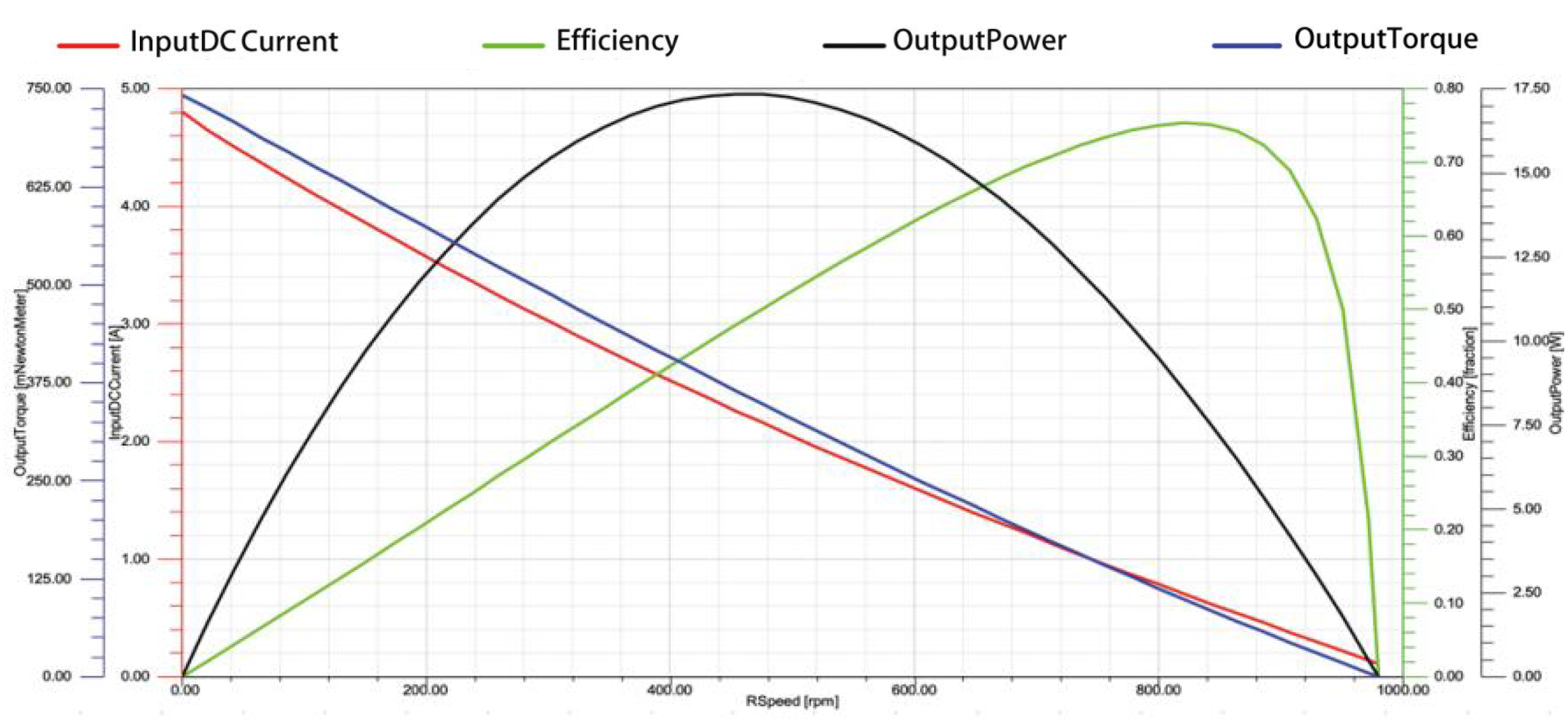
L-5010 Motor Characteristics
| Part Number | L-5010 | |||
|---|---|---|---|---|
| Gear Reduction Type | - | Direct Drive | ||
| Rated Voltage | V | 16 | ||
| Rated Current | A | 1.65 | ||
| Rated Torque | Nm | 0.26 | ||
| Rated Speed | RPM | 600 | ||
| Max Speed | RPM | 1015 | ||
| Peak Torque | Nm | 0.65 | ||
| Peak Current | A | 4.8 | ||
| Phase Resistance | Ohm | 3.2 | ||
| Connection Type | - | Y | ||
| Phase Inductance | mH | 1.2 | ||
| Speed Constant | RPM/V | 63 | ||
| Torque Constant | Nm/A | 0.16 | ||
| Rotor Inertia | gcm² | 202 | ||
| Number of Pole Pairs | - | 14 | ||
| Motor Weight | g | 135 | ||
| Working Temperature | C | -20 ~ 80 | ||
| Max Demagnetize Temperature | C | 120 | ||
| Control Precision | deg | 0.01 | ||
| Drive | - | MC100 | ||
| Input Voltage | V | 8-24 | ||
| Current | A | Nominal: 5A; Instantaneous: 8A | ||
| Rated Power | W | 100 | ||
| Encoder | - | 18-bit Magnetic Encoder | ||
| Communication Method and Baud Rate | - | CAN BUS :1M ; RS485: 115200/500k/1M/2.5M | ||
| Control Mode | - | Torque loop (current loop) / speed loop / position loop | ||
| S-Curve | - | Yes | ||