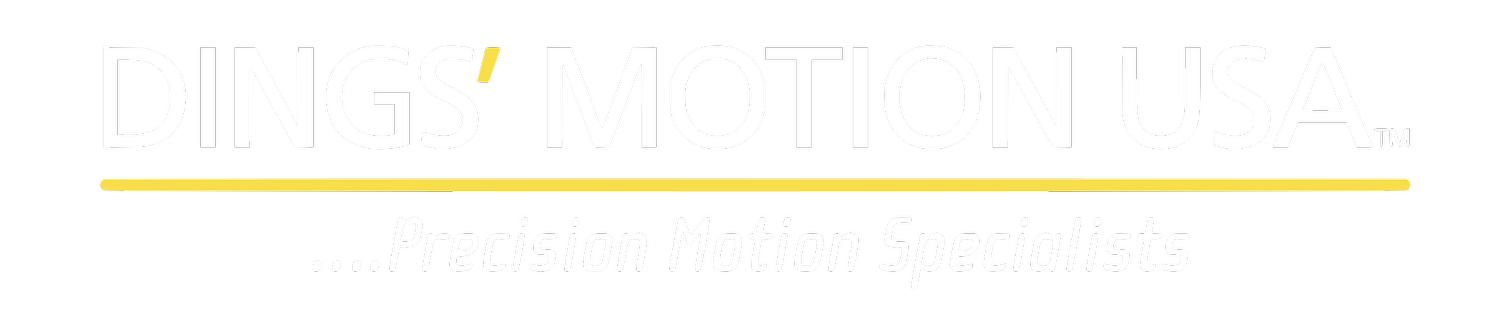
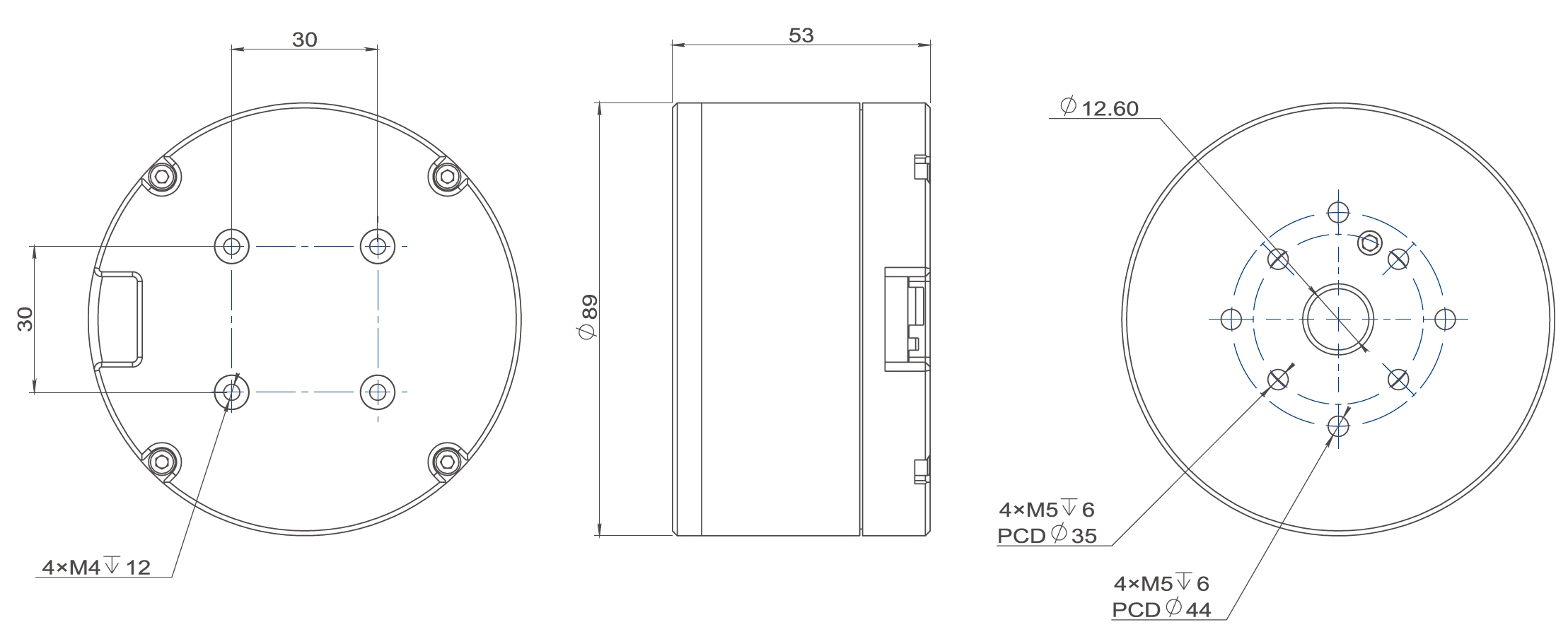
L-9025 - Motor Characteristics
L-9025 Motor Characteristics
| Part Number | L-9025 | |||
|---|---|---|---|---|
| Gear Reduction Type | - | Direct Drive | ||
| Rated Voltage | V | 24 | ||
| Rated Current | A | 3.36 | ||
| Rated Torque | Nm | 2.79 | ||
| Rated Speed | RPM | 130 | ||
| Max Speed | RPM | 280 | ||
| Peak Torque | Nm | 5.8 | ||
| Peak Current | A | 7.6 | ||
| Phase Resistance | Ohm | 1.9 | ||
| Connection Type | - | Y | ||
| Phase Inductance | mH | 4.71 | ||
| Speed Constant | RPM/V | 12 | ||
| Torque Constant | Nm/A | 0.76 | ||
| Rotor Inertia | gcm² | 4656 | ||
| Number of Pole Pairs | - | 14 | ||
| Motor Weight | g | 880 | ||
| Working Temperature | C | -20 ~ 80 | ||
| Max Demagnetize Temperature | C | 120 | ||
| Control Precision | deg | 0.01 | ||
| Drive | - | MC200 | ||
| Input Voltage | V | 8-36 | ||
| Current | A | Nominal: 8A; Instantaneous: 15A | ||
| Rated Power | W | 200 | ||
| Encoder | - | 14-bit Magnetic Encoder | ||
| Communication Method and Baud Rate | - | CAN BUS :1M ; RS485: 115200/500k/1M/2.5M | ||
| Control Mode | - | Torque loop (current loop) / speed loop / position loop | ||
| S-Curve | - | Yes | ||

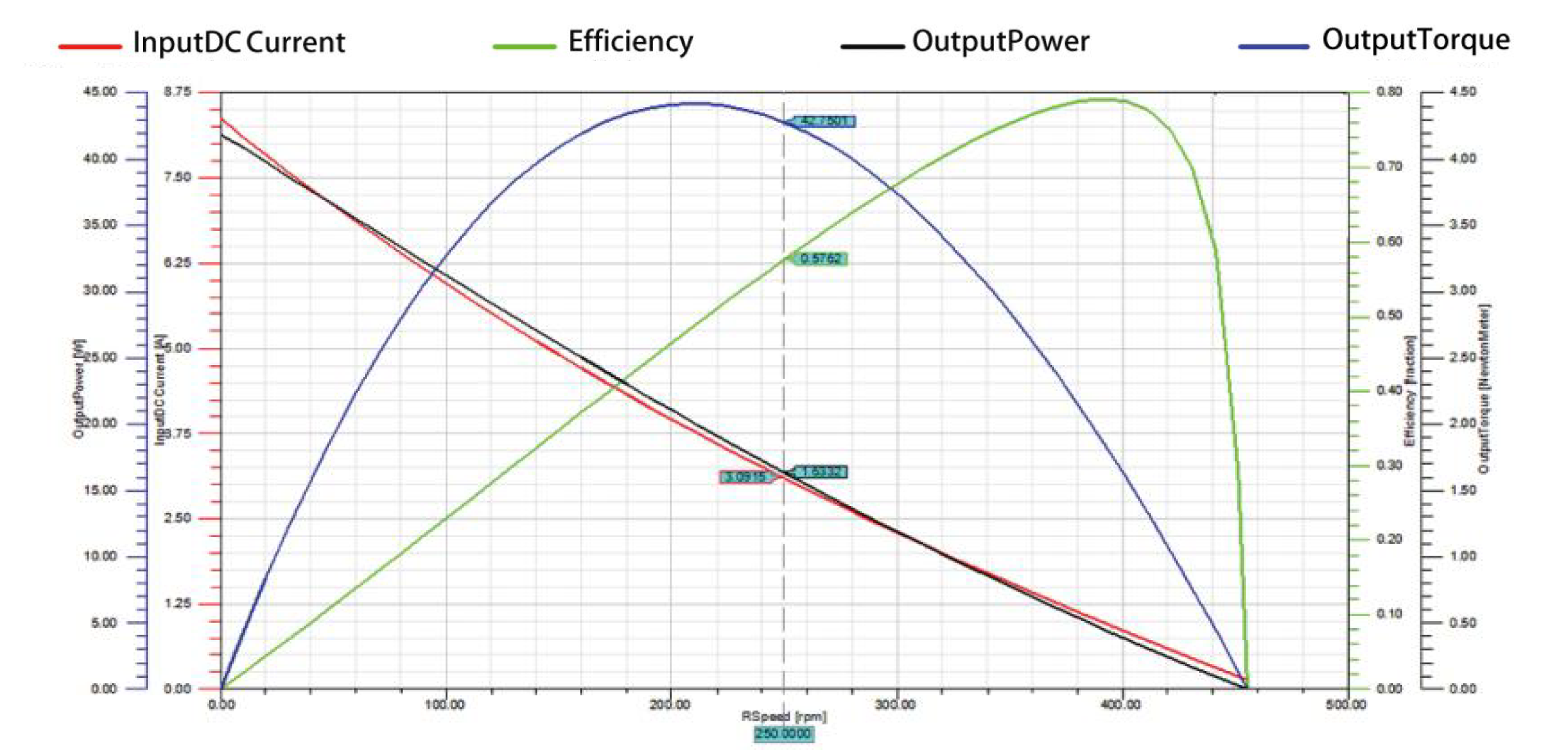
L-9015 - Motor Characteristics
L-9015 Motor Characteristics
| Part Number | L-9015 | |||
|---|---|---|---|---|
| Gear Reduction Type | - | Direct Drive | ||
| Rated Voltage | V | 24 | ||
| Rated Current | A | 3.34 | ||
| Rated Torque | Nm | 1.67 | ||
| Rated Speed | RPM | 290 | ||
| Max Speed | RPM | 500 | ||
| Peak Torque | Nm | 5 | ||
| Peak Current | A | 11 | ||
| Phase Resistance | Ohm | 1.51 | ||
| Connection Type | - | Y | ||
| Phase Inductance | mH | 1.05 | ||
| Speed Constant | RPM/V | 21 | ||
| Torque Constant | Nm/A | 0.45 | ||
| Rotor Inertia | gcm² | 3271 | ||
| Number of Pole Pairs | - | 14 | ||
| Motor Weight | g | 650 | ||
| Working Temperature | C | -20 ~ 80 | ||
| Max Demagnetize Temperature | C | 120 | ||
| Control Precision | deg | 0.01 | ||
| Drive | - | MC200 | ||
| Input Voltage | V | 8-36 | ||
| Current | A | Nominal: 8A; Instantaneous: 15A | ||
| Rated Power | W | 200 | ||
| Encoder | - | 14-bit Magnetic Encoder | ||
| Communication Method and Baud Rate | - | CAN BUS :1M ; RS485: 115200/500k/1M/2.5M | ||
| Control Mode | - | Torque loop (current loop) / speed loop / position loop | ||
| S-Curve | - | Yes | ||


L-7025 - Motor Characteristics
L-7025 Motor Characteristics
| Part Number | L-7025 | |||
|---|---|---|---|---|
| Gear Reduction Type | - | Direct Drive | ||
| Rated Voltage | V | 24 | ||
| Rated Current | A | 3 | ||
| Rated Torque | Nm | 1.6 | ||
| Rated Speed | RPM | 280 | ||
| Max Speed | RPM | 510 | ||
| Peak Torque | Nm | 4.1 | ||
| Peak Current | A | 8.5 | ||
| Phase Resistance | Ohm | 2.2 | ||
| Connection Type | - | Y | ||
| Phase Inductance | mH | 2.95 | ||
| Speed Constant | RPM/V | 21 | ||
| Torque Constant | Nm/A | 0.53 | ||
| Rotor Inertia | gcm² | 1040 | ||
| Number of Pole Pairs | - | 14 | ||
| Motor Weight | g | 540 | ||
| Working Temperature | C | -20 ~ 80 | ||
| Max Demagnetize Temperature | C | 120 | ||
| Control Precision | deg | 0.01 | ||
| Drive | - | MC200 | ||
| Input Voltage | V | 8-36 | ||
| Current | A | Nominal: 8A; Instantaneous: 15A | ||
| Rated Power | W | 200 | ||
| Encoder | - | 18-bit Magnetic Encoder | ||
| Communication Method and Baud Rate | - | CAN BUS :1M ; RS485: 115200/500k/1M/2.5M | ||
| Control Mode | - | Torque loop (current loop) / speed loop / position loop | ||
| S-Curve | - | Yes | ||

L-7015 - Motor Characteristics
L-7015 Motor Characteristics
| Part Number | L-7015 | |||
|---|---|---|---|---|
| Gear Reduction Type | - | Direct Drive | ||
| Rated Voltage | V | 24 | ||
| Rated Current | A | 3.62 | ||
| Rated Torque | Nm | 1 | ||
| Rated Speed | RPM | 580 | ||
| Max Speed | RPM | 805 | ||
| Peak Torque | Nm | 3.8 | ||
| Peak Current | A | 15 | ||
| Phase Resistance | Ohm | 1.14 | ||
| Connection Type | - | Y | ||
| Phase Inductance | mH | 1.25 | ||
| Speed Constant | RPM/V | 34 | ||
| Torque Constant | Nm/A | 0.28 | ||
| Rotor Inertia | gcm² | 933 | ||
| Number of Pole Pairs | - | 14 | ||
| Motor Weight | g | 360 | ||
| Working Temperature | C | -20 ~ 80 | ||
| Max Demagnetize Temperature | C | 120 | ||
| Control Precision | deg | 0.01 | ||
| Drive | - | MC200 | ||
| Input Voltage | V | 8-36 | ||
| Current | A | Nominal: 8A; Instantaneous: 15A | ||
| Rated Power | W | 200 | ||
| Encoder | - | 18-bit Magnetic Encoder | ||
| Communication Method and Baud Rate | - | CAN BUS :1M ; RS485: 115200/500k/1M/2.5M | ||
| Control Mode | - | Torque loop (current loop) / speed loop / position loop | ||
| S-Curve | - | Yes | ||

L-5015 - Motor Characteristics
L-5015 Motor Characteristics
| Part Number | L-5015 | |||
|---|---|---|---|---|
| Gear Reduction Type | - | Direct Drive | ||
| Rated Voltage | V | 16 | ||
| Rated Current | A | 1.57 | ||
| Rated Torque | Nm | 0.36 | ||
| Rated Speed | RPM | 350 | ||
| Max Speed | RPM | 680 | ||
| Peak Torque | Nm | 0.82 | ||
| Peak Current | A | 3.62 | ||
| Phase Resistance | Ohm | 4.0 | ||
| Connection Type | - | Y | ||
| Phase Inductance | mH | 1.76 | ||
| Speed Constant | RPM/V | 43 | ||
| Torque Constant | Nm/A | 0.23 | ||
| Rotor Inertia | gcm² | 268 | ||
| Number of Pole Pairs | - | 14 | ||
| Motor Weight | g | 174 | ||
| Working Temperature | C | -20 ~ 80 | ||
| Max Demagnetize Temperature | C | 120 | ||
| Control Precision | deg | 0.01 | ||
| Drive | - | MC100 | ||
| Input Voltage | V | 8-24 | ||
| Current | A | Nominal: 5A; Instantaneous: 8A | ||
| Rated Power | W | 100 | ||
| Encoder | - | 14-bit Magnetic Encoder | ||
| Communication Method and Baud Rate | - | CAN BUS :1M ; RS485: 115200/500k/1M/2.5M | ||
| Control Mode | - | Torque loop (current loop) / speed loop / position loop | ||
| S-Curve | - | Yes | ||


L-5010 - Motor Characteristics
L-5010 Motor Characteristics
| Part Number | L-5010 | |||
|---|---|---|---|---|
| Gear Reduction Type | - | Direct Drive | ||
| Rated Voltage | V | 16 | ||
| Rated Current | A | 1.65 | ||
| Rated Torque | Nm | 0.26 | ||
| Rated Speed | RPM | 600 | ||
| Max Speed | RPM | 1015 | ||
| Peak Torque | Nm | 0.65 | ||
| Peak Current | A | 4.8 | ||
| Phase Resistance | Ohm | 3.2 | ||
| Connection Type | - | Y | ||
| Phase Inductance | mH | 1.2 | ||
| Speed Constant | RPM/V | 63 | ||
| Torque Constant | Nm/A | 0.16 | ||
| Rotor Inertia | gcm² | 202 | ||
| Number of Pole Pairs | - | 14 | ||
| Motor Weight | g | 135 | ||
| Working Temperature | C | -20 ~ 80 | ||
| Max Demagnetize Temperature | C | 120 | ||
| Control Precision | deg | 0.01 | ||
| Drive | - | MC100 | ||
| Input Voltage | V | 8-24 | ||
| Current | A | Nominal: 5A; Instantaneous: 8A | ||
| Rated Power | W | 100 | ||
| Encoder | - | 18-bit Magnetic Encoder | ||
| Communication Method and Baud Rate | - | CAN BUS :1M ; RS485: 115200/500k/1M/2.5M | ||
| Control Mode | - | Torque loop (current loop) / speed loop / position loop | ||
| S-Curve | - | Yes | ||


L-5005 - Motor Characteristics
L-5005 Motor Characteristics
| Part Number | L-5005 | |||
|---|---|---|---|---|
| Gear Reduction Type | - | Direct Drive | ||
| Rated Voltage | V | 16 | ||
| Rated Current | A | 1.67 | ||
| Rated Torque | Nm | 0.13 | ||
| Rated Speed | RPM | 1360 | ||
| Max Speed | RPM | 1970 | ||
| Peak Torque | Nm | 0.42 | ||
| Peak Current | A | 5.0 | ||
| Phase Resistance | Ohm | 2.0 | ||
| Connection Type | - | Y | ||
| Phase Inductance | mH | 0.65 | ||
| Speed Constant | RPM/V | 123 | ||
| Torque Constant | Nm/A | 0.08 | ||
| Rotor Inertia | gcm² | 138 | ||
| Number of Pole Pairs | - | 14 | ||
| Motor Weight | g | 92 | ||
| Working Temperature | C | -20 ~ 80 | ||
| Max Demagnetize Temperature | C | 120 | ||
| Control Precision | deg | 0.01 | ||
| Drive | - | MC100 | ||
| Input Voltage | V | 8-24 | ||
| Current | A | Nominal: 5A; Instantaneous: 8A | ||
| Rated Power | W | 100 | ||
| Encoder | - | 14-bit Magnetic Encoder | ||
| Communication Method and Baud Rate | - | CAN BUS :1M ; RS485: 115200/500k/1M/2.5M | ||
| Control Mode | - | Torque loop (current loop) / speed loop / position loop | ||
| S-Curve | - | Yes | ||

